Robotik, günümüz teknolojisinin en heyecan verici ve hızla gelişen alanlarından biridir. Otomasyon, yapay zeka ve mühendisliğin kesişim noktasında yer alan robotik, hayatımızı kökten değiştirecek potansiyele sahiptir. Bu ders notları, robotik dünyasına adım atmak isteyen herkes için temel kavramları, bileşenleri ve çalışma prensiplerini anlaşılır bir dille sunmaktadır.
1. Robot Nedir?
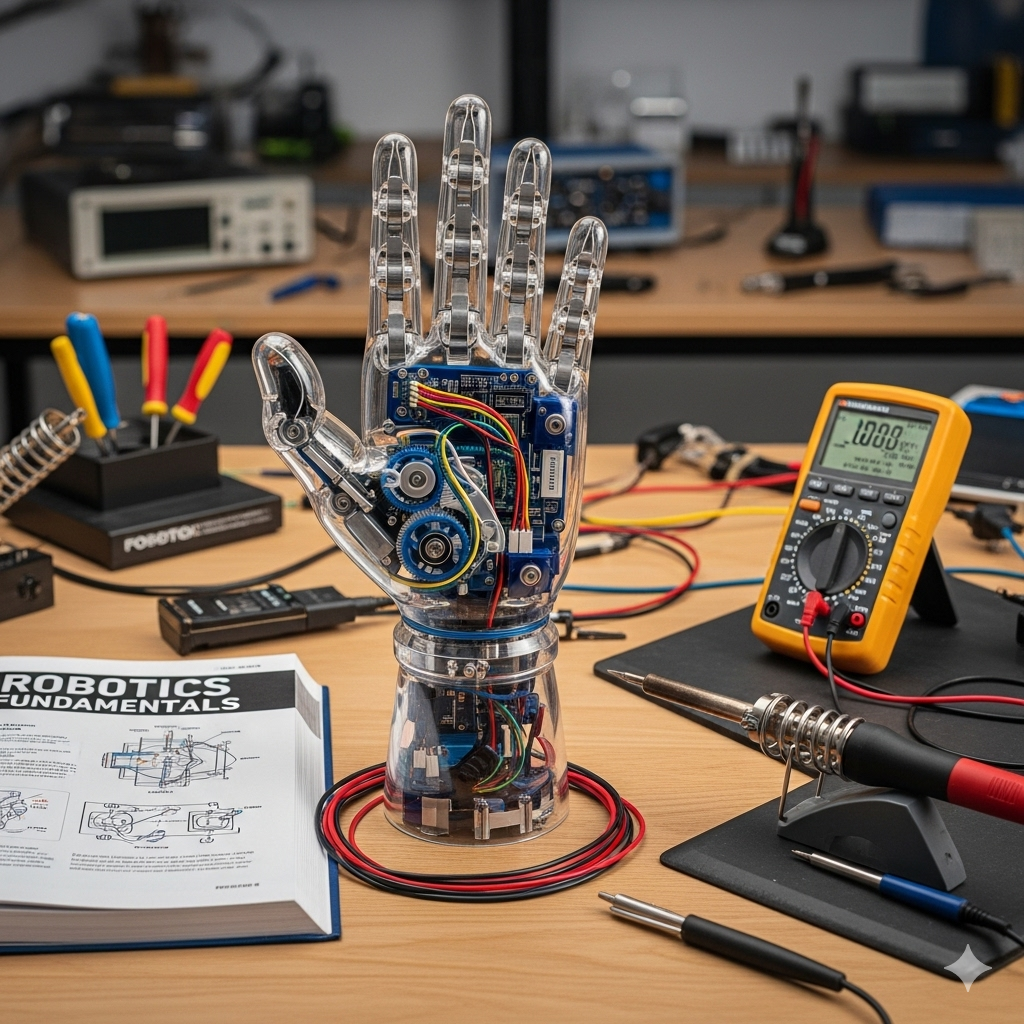
Bir robot, karmaşık görevleri otomatik olarak yerine getirmek üzere tasarlanmış, genellikle programlanabilen bir makinedir. Robotlar, çevrelerini algılayabilir, karar verebilir ve fiziksel eylemler gerçekleştirebilirler. Temel olarak üç ana bileşenden oluşurlar:
- Mekanik Yapı (Gövde): Robotun fiziksel iskeleti ve hareketli parçaları.
- Algılayıcılar (Sensörler): Çevreden bilgi toplayan cihazlar (mesafe sensörü, kamera, dokunmatik sensör vb.).
- Kontrol Sistemi (Beyin): Algılanan bilgiyi işleyerek robotun davranışlarını yönlendiren donanım ve yazılım (mikrodenetleyici, bilgisayar).
- Aktüatörler (Hareket Mekanizmaları): Robotun fiziksel hareketlerini sağlayan bileşenler (motorlar, hidrolik/pnömatik silindirler).
Örnek: Bir endüstriyel robot kolu, bir ürünün montajını yaparken, sensörleri ile parçanın konumunu algılar, kontrol sistemi bu bilgiyi işler ve aktüatörleri (motorları) kullanarak kolu doğru pozisyona getirir.
2. Robotların Sınıflandırılması
Robotlar, uygulama alanlarına ve özelliklerine göre farklı şekillerde sınıflandırılabilir:
2.1. Endüstriyel Robotlar
Üretim hatlarında tekrarlayan ve hassas görevleri yerine getiren robotlardır. Genellikle sabit bir konuma monte edilirler ve belirli bir işi yüksek hız ve doğrulukla yaparlar. Örnekler: Kaynak robotları, montaj robotları, boyama robotları.
2.2. Mobil Robotlar
Fiziksel bir ortamda hareket edebilen robotlardır. Tekerlekli, paletli, bacaklı veya uçan platformlar şeklinde olabilirler. Örnekler: Otonom araçlar, keşif dronları, ev süpürme robotları.
2.3. İnsansı Robotlar (Humanoid Robotlar)
İnsan benzeri bir görünüme ve hareket kabiliyetine sahip robotlardır. Genellikle karmaşık denge ve yürüme algoritmaları gerektirirler. Örnekler: Sophia, Atlas.
2.4. Servis Robotları
İnsanlara belirli hizmetler sunan robotlardır. Endüstriyel olmayan ortamlarda kullanılırlar. Örnekler: Hastane robotları, otel servis robotları, evcil hayvan robotları.
3. Robotik Sistemlerin Temel Bileşenleri Detaylı İncelenmesi
3.1. Algılayıcılar (Sensörler)
Robotların çevreyi algılamasını sağlayan donanımlardır. Temel sensör türleri:
- Mesafe Sensörleri: Ultrasonik (HC-SR04) veya Kızılötesi (IR) sensörler, robotun engellerden uzaklığını ölçer.
Örnek: Ultrasonik Mesafe Sensörü (HC-SR04) Çalışma Prensibi
import RPi.GPIO as GPIO import time GPIO.setmode(GPIO.BCM) TRIG = 23 ECHO = 24 GPIO.setup(TRIG, GPIO.OUT) GPIO.setup(ECHO, GPIO.IN) def get_distance(): GPIO.output(TRIG, True) time.sleep(0.00001) GPIO.output(TRIG, False) pulse_start = time.time() pulse_end = time.time() while GPIO.input(ECHO) == 0: pulse_start = time.time() while GPIO.input(ECHO) == 1: pulse_end = time.time() pulse_duration = pulse_end - pulse_start distance = pulse_duration * 17150 # Ses hızı (343 m/s) / 2 distance = round(distance, 2) return distance try: while True: dist = get_distance() print(f"Mesafe: {dist} cm") time.sleep(1) except KeyboardInterrupt: GPIO.cleanup() - Kamera Modülleri: Görüntü işleme ve nesne tanıma için kullanılır.
- Çizgi Takip Sensörleri: Robotun bir çizgi üzerinde ilerlemesini sağlar.
- IMU (İvmeölçer ve Jiroskop): Robotun konumunu, hızını ve yönünü belirlemek için kullanılır.
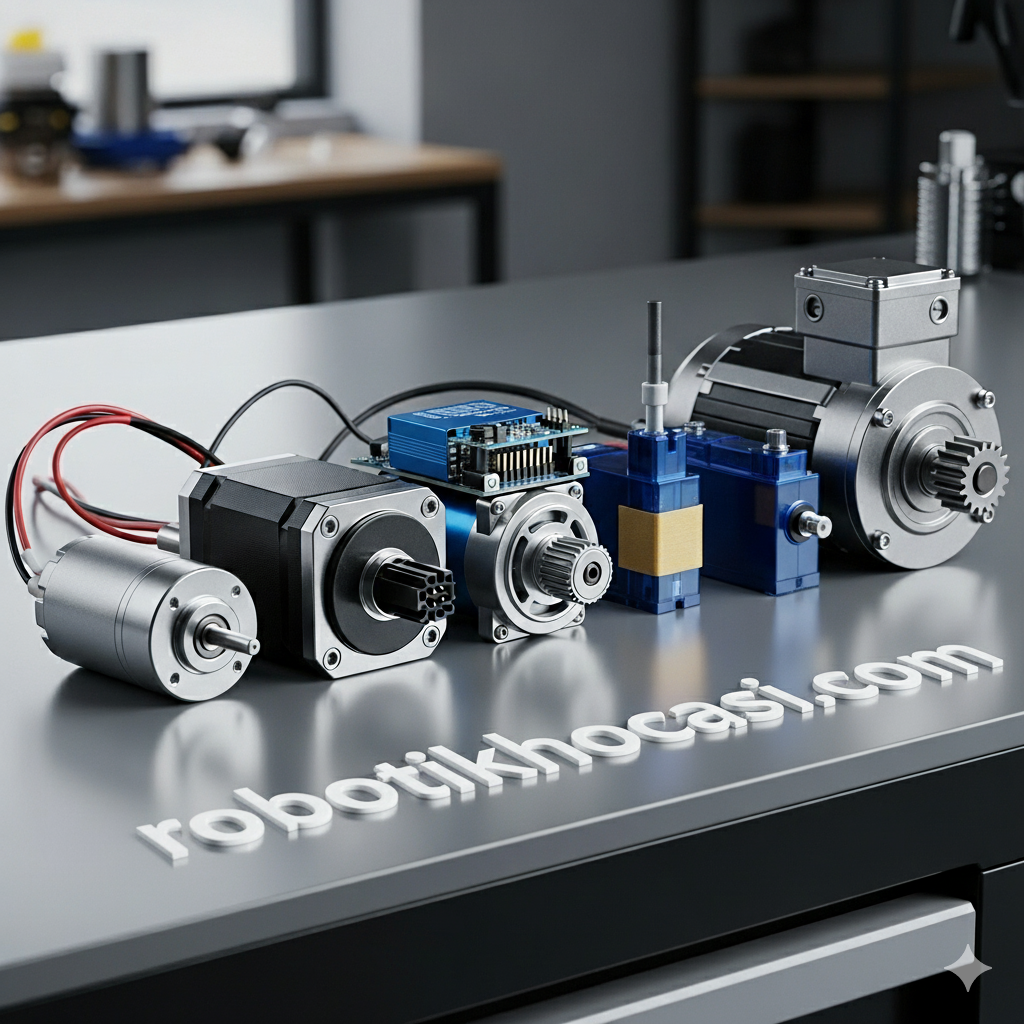
3.2. Aktüatörler (Hareket Mekanizmaları)
Robotun fiziksel eylemleri gerçekleştirmesini sağlayan bileşenlerdir:
- DC Motorlar: Sürekli dönüş hareketi sağlar. Genellikle tekerlekli robotlarda kullanılır.
- Servo Motorlar: Belirli açılarda hassas kontrol imkanı sunar. Robot kolları ve denge sistemlerinde yaygındır.
Örnek: Servo Motor Kontrolü (Arduino ile Basit Bir Örnek)
#include <Servo.h> Servo myservo; // Bir servo motor objesi oluştur void setup() { myservo.attach(9); // Servo motoru dijital pin 9'a bağla } void loop() { myservo.write(0); // Servo motoru 0 dereceye getir delay(1000); // 1 saniye bekle myservo.write(90); // Servo motoru 90 dereceye getir delay(1000); myservo.write(180); // Servo motoru 180 dereceye getir delay(1000); } - Step Motorlar: Adım adım hassas dönüş sağlar. 3D yazıcılar ve CNC makinelerinde kullanılır.
3.3. Kontrol Sistemi
Robotun "beyni"dir. Algılanan verileri işler, karar verir ve aktüatörlere komutlar gönderir.
- Mikrodenetleyiciler (Arduino gibi): Daha basit görevler ve gerçek zamanlı kontrol için idealdir.
- Tek Kart Bilgisayarlar (Raspberry Pi gibi): Daha karmaşık görevler, işletim sistemi tabanlı uygulamalar, yapay zeka ve görüntü işleme için kullanılır.
- PLC'ler (Programlanabilir Mantık Denetleyicileri): Endüstriyel otomasyon sistemlerinde yaygındır.
4. Robot Hareket Mekanizmaları
Robotların çevrelerinde nasıl hareket ettikleri, mekanik tasarımlarına göre değişir:
- Tekerlekli Robotlar: En yaygın mobil robot türüdür. Farklı tekerlek konfigürasyonları (iki tekerlekli, üç tekerlekli, omnidirectionel) bulunur. Düz zeminlerde hızlı ve verimlidirler.
- Paletli Robotlar: Zorlu arazi koşullarında (kum, çamur, merdivenler) daha iyi çekiş ve denge sağlarlar.
- Bacaklı Robotlar: Engelleri aşma, merdiven çıkma gibi karmaşık hareketler için tasarlanmıştır. Yürüme algoritmaları oldukça karmaşıktır.
- Uçan Robotlar (Dronlar): Havada hareket eden, genellikle kamera veya sensörlerle donatılmış robotlardır. Keşif, gözetleme ve teslimat gibi alanlarda kullanılırlar.
Bu ders notları, robotik alanına sağlam bir temel oluşturmanıza yardımcı olacaktır. Daha derinlemesine bilgi edinmek ve pratik uygulamalar yapmak için sitemizdeki diğer rehberleri ve projeleri incelemenizi öneririz.